📝 Tarea semana 4 - Opción Low-Code: Imputación de valores faltantes y modelado de series temporales¶
📌 Descripción del dataset¶
El conjunto de datos corresponde a mediciones de calidad del aire recogidas en una estación en Italia, con registros horarios entre marzo de 2004 y abril de 2005. Las variables principales son:
| N° | Variable | Descripción |
|---|---|---|
| 2 | CO(GT) | Concentración verdadera de CO (mg/m³, referencia) |
| 3 | PT08.S1(CO) | Respuesta del sensor de óxido de estaño (target: CO) |
| 4 | NMHC(GT) | Concentración verdadera de hidrocarburos no metánicos (μg/m³, referencia) |
| 5 | C6H6(GT) | Concentración verdadera de benceno (μg/m³, referencia) |
| 6 | PT08.S2(NMHC) | Respuesta del sensor de titania (target: NMHC) |
| 7 | NOx(GT) | Concentración verdadera de NOx (ppb, referencia) |
| 8 | PT08.S3(NOx) | Respuesta del sensor de óxido de tungsteno (target: NOx) |
| 9 | NO2(GT) | Concentración verdadera de NO2 (μg/m³, referencia) |
| 10 | PT08.S4(NO2) | Respuesta del sensor de óxido de tungsteno (target: NO2) |
| 11 | PT08.S5(O3) | Respuesta del sensor de óxido de indio (target: O3) |
| 12 | T | Temperatura (°C) |
| 13 | RH | Humedad relativa (%) |
| 14 | AH | Humedad absoluta |
🎯 Propósito de la tarea¶
La tarea tiene dos objetivos principales:
1️⃣ Imputación de valores faltantes¶
Simular valores faltantes en el dataset mediante dos enfoques:
- Aleatorio (at random): Se eliminan valores de forma dispersa.
- En bloques (in blocks): Se eliminan valores en secuencias consecutivas para simular fallos de sensores.
- Aplicar un método de imputación (por ejemplo, interpolación, modelo simple, técnica automática de la biblioteca proporcionada) para completar los datos.
2️⃣ Modelado de serie temporal¶
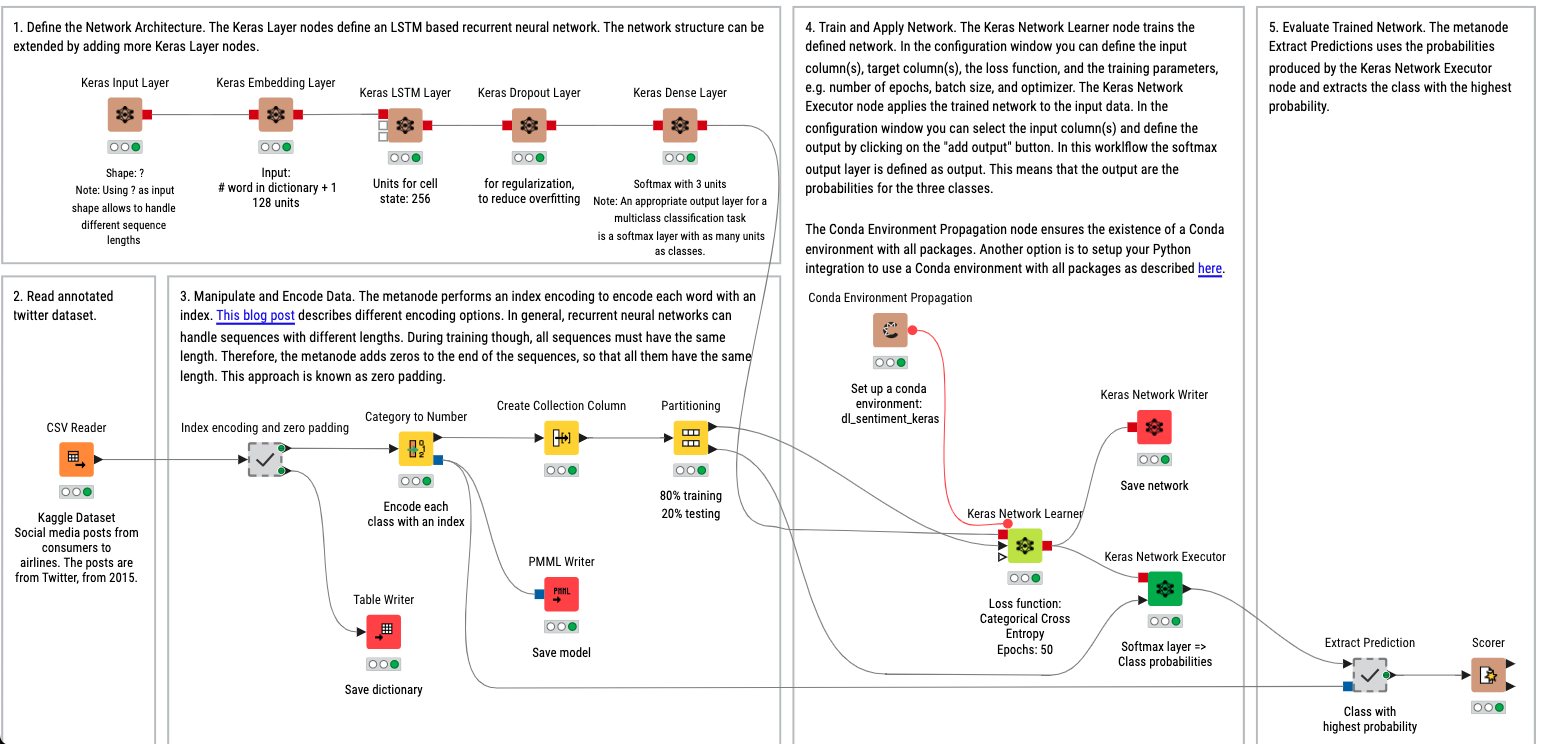
- Seleccionar una variable adecuada para modelar con un LSTM o un Transformer.
- La variable recomendada es: CO(GT) (Concentración de monóxido de carbono en mg/m³) 👉 Justificación: CO(GT) es una variable con patrones estacionales y tendencias temporales claras, es de interés ambiental y presenta correlación con otras mediciones del dataset.
- Desarrollar un modelo básico (low-code) para predecir el valor futuro de CO(GT), usando las variables disponibles como entradas y evaluando el desempeño del modelo.
⚙️ Instrucciones¶
Esta es una tarea low-code: Se proporcionarán plantillas de código o scripts básicos, enfócate en:
- Comprender el proceso de imputación y modelado.
- Ejecutar el flujo de trabajo.
- Interpretar y discutir los resultados: calidad de la imputación y precisión del modelo de predicción.
- Analizar las métricas (MAE, MSE, RMSE, R²) para la imputación y la predicción.
✅ Entregables¶
Un breve informe que incluya:
- Gráficos de la serie original, con y sin imputación.
- Métricas de evaluación de la imputación.
- Gráficos y métricas del modelo LSTM o Transformer (por ejemplo: RMSE en test).
- Reflexión sobre la calidad de la imputación y el modelo.
🎯 Generación de valores faltantes aleatorios (Missing At Blocks)¶
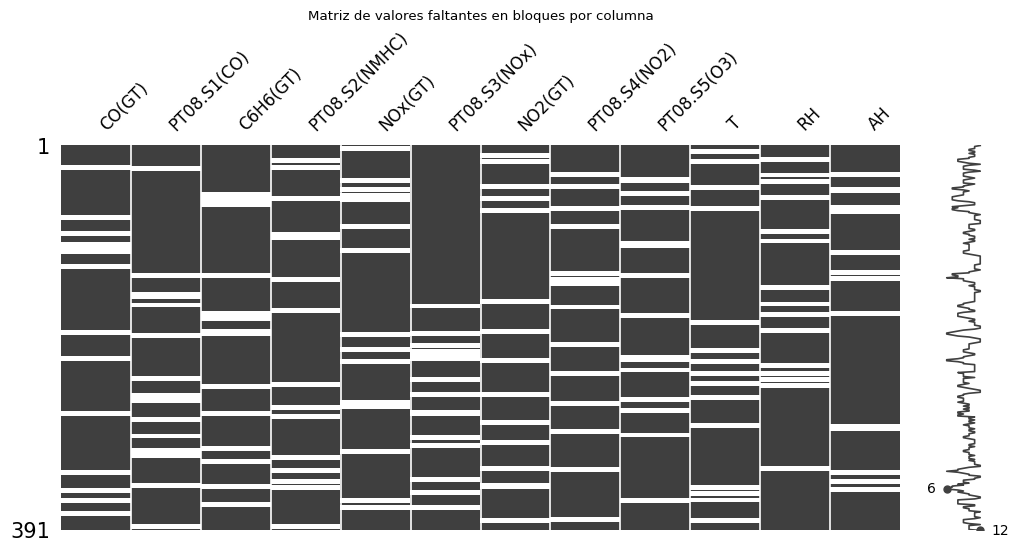
En esta parte se introduce un 20% de valores faltantes en el dataset diario en forma de bloques en cada columna. Esto simula errores aislados en la medición, típicos de fallos esporádicos en los sensores.
# ----------------------------------------
# 📌 IMPORTAR LIBRERÍAS
# ----------------------------------------
import pandas as pd
import numpy as np
import matplotlib.pyplot as plt
import seaborn as sns
import missingno as msno
# ----------------------------------------
# 📌 CARGAR EL DATASET
# ----------------------------------------
df = pd.read_csv('https://raw.githubusercontent.com/marsgr6/rna-online/refs/heads/main/data/AirQualityUCI.csv')
# Combina fecha y hora en un solo índice de tipo datetime
df['DateTime'] = pd.to_datetime(df['Date'] + ' ' + df['Time'], errors='coerce')
df = df.drop(columns=['Date', 'Time'])
df = df.set_index('DateTime')
# Convierte los datos a numérico y reemplaza valores negativos por 0
df = df.apply(pd.to_numeric, errors='coerce')
df[df < 0] = 0
# Elimina la columna NMHC(GT) por calidad de datos
if 'NMHC(GT)' in df.columns:
df = df.drop(columns=['NMHC(GT)'])
# Resamplea a datos diarios calculando la media
df_daily = df.resample('D').mean()
df_original = df_daily.copy()
# ----------------------------------------
# 📌 INTRODUCIR VALORES FALTANTES ALEATORIAMENTE POR COLUMNA
# ----------------------------------------
def introduce_missing_per_column(data, frac=0.2):
"""
Introduce valores faltantes de forma aleatoria por columna.
Parámetros:
- data: DataFrame de entrada
- frac: Fracción de datos a eliminar por columna
Retorna:
- data_missing: DataFrame con valores faltantes introducidos
- nan_mask: Máscara booleana que marca los NaN introducidos
"""
data_missing = data.copy()
nan_mask = pd.DataFrame(False, index=data.index, columns=data.columns) # Máscara para rastrear NaNs
np.random.seed(42) # Fijar semilla para reproducibilidad
for column in data.columns:
n_total = len(data[column])
n_missing = int(n_total * frac) # Cantidad de valores a eliminar
missing_positions = np.random.choice(n_total, n_missing, replace=False) # Índices aleatorios
# Introducir NaN
data_missing.iloc[missing_positions, data.columns.get_loc(column)] = np.nan
nan_mask.iloc[missing_positions, data.columns.get_loc(column)] = True
print(f"Number of missing values introduced: {nan_mask.sum().sum()}")
return data_missing, nan_mask
def introduce_missing_blocks(data, frac=0.2, block_size=5):
"""
Introduce missing data in contiguous blocks.
Parameters:
- data: DataFrame
- frac: Fraction of data points to set as NaN
- block_size: Number of consecutive rows in each missing block
Returns:
- data_missing: DataFrame with missing values
- nan_mask: Boolean DataFrame where True = missing position introduced
"""
data_missing = data.copy()
nan_mask = pd.DataFrame(False, index=data.index, columns=data.columns)
n_total = len(data)
n_blocks_per_col = int((n_total * frac) / block_size)
np.random.seed(42)
for col in data.columns:
for _ in range(n_blocks_per_col):
start_idx = np.random.randint(0, n_total - block_size + 1)
block_idx = data.index[start_idx : start_idx + block_size]
data_missing.loc[block_idx, col] = np.nan
nan_mask.loc[block_idx, col] = True
print(f"Number of missing values introduced: {nan_mask.sum().sum()}")
return data_missing, nan_mask
df_missing, nan_mask = introduce_missing_blocks(df_daily, frac=0.2, block_size=5)
# Visualize
import missingno as msno
msno.matrix(df_missing, figsize=(12, 5), fontsize=12)
plt.title("Matriz de valores faltantes en bloques por columna")
plt.show()
# ----------------------------------------
# 📌 PLOT SERIES TEMPORALES EN 2 COLUMNAS (CON PUNTOS ROJOS PARA MISSING)
# ----------------------------------------
cols = df_missing.columns
n_cols = 2
n_rows = int(np.ceil(len(cols) / n_cols))
fig, axes = plt.subplots(n_rows, n_cols, figsize=(14, 2 * n_rows), sharex=True)
axes = axes.reshape(n_rows, n_cols)
for i, col in enumerate(cols):
ax = axes[i // n_cols, i % n_cols]
# Whole series as a blue line
ax.plot(df_missing.index, df_original[col], color='blue', alpha=0.7, label='Original')
# Red dots where missing
ax.plot(df_missing.index[df_missing[col].isna()],
df_original[col][df_missing[col].isna()],
'r.', label='Missing', markersize=6)
ax.set_title(f"{col}")
ax.set_ylabel(col)
# Remove empty subplots
for j in range(i + 1, n_rows * n_cols):
fig.delaxes(axes[j // n_cols, j % n_cols])
handles, labels = ax.get_legend_handles_labels()
fig.legend(handles, labels, loc='upper center', ncol=2)
plt.tight_layout(rect=[0, 0, 1, 0.96])
plt.suptitle("Daily Time Series with Missing Data Highlighted", fontsize=16)
plt.show()
✅ Lo que se espera¶
Ejecutar el código y analizar los gráficos generados.
Reflexionar: ¿Cómo se distribuyen los valores faltantes aleatorios? ¿Qué impacto tendría esto en la imputación?
🎯 Imputación de valores faltantes con SAITS¶
- Requistos
Pyton
!pip install pypots==0.11En esta sección se utiliza el modelo SAITS (Self-Attention-based Imputation for Time Series) del paquete pypots para imputar los valores faltantes generados previamente.
El modelo está basado en transformers y es capaz de capturar dependencias temporales en las series.
import missingno as msno
import pandas as pd
import numpy as np
from pypots.imputation import SAITS
from sklearn.preprocessing import MinMaxScaler
# ----------------------------------------
# 📌 CONFIGURACIÓN DE PARÁMETROS
# ----------------------------------------
seq_len = 7 # Longitud de la ventana temporal (por ejemplo, 7 días)
n_features = len(df_missing.columns) # Número de variables (columnas)
# ----------------------------------------
# 📌 PREPARAR LOS DATOS PARA SAITS
# ----------------------------------------
# Convertir DataFrame a array numpy
data = df_missing.to_numpy(dtype=np.float32)
# Generar ventanas deslizantes de longitud seq_len
n_samples = len(data) - seq_len + 1
X = np.array([data[i:i + seq_len] for i in range(n_samples)])
print("Shape de X:", X.shape)
# ----------------------------------------
# 📌 AJUSTAR X PARA QUE COINCIDA CON EL NÚMERO DE DÍAS ORIGINALES
# ----------------------------------------
# Repetir y rellenar filas para cubrir todos los días
repeat_factor = data.shape[0] // X.shape[0]
extra_rows = data.shape[0] % X.shape[0]
expanded_arr = np.repeat(X, repeat_factor, axis=0)
expanded_arr = np.vstack([expanded_arr, X[:extra_rows]])
# Asegurar que las últimas filas coincidan con los datos originales
expanded_arr[-extra_rows:, 0, :] = data[-extra_rows:]
print("Shape de X expandido:", expanded_arr.shape)
# ----------------------------------------
# 📌 NORMALIZAR LOS DATOS
# ----------------------------------------
scaler = MinMaxScaler()
X_reshaped = expanded_arr.reshape(-1, expanded_arr.shape[-1])
X_scaled = scaler.fit_transform(X_reshaped)
X_scaled = X_scaled.reshape(expanded_arr.shape)
print("Shape de X escalado:", X_scaled.shape)
# ----------------------------------------
# 📌 ENTRENAR EL MODELO SAITS
# ----------------------------------------
saits = SAITS(n_steps=seq_len, n_features=n_features,
n_layers=2, d_model=256, d_ffn=128,
n_heads=4, d_k=64, d_v=64, dropout=0.1, epochs=100)
dataset = {"X": X_scaled}
saits.fit(dataset) # Entrenar el modelo
imputation = saits.impute(dataset) # Imputar los valores faltantes
# ----------------------------------------
# 📌 DESNORMALIZAR LA IMPUTACIÓN
# ----------------------------------------
imputation_reshaped = imputation.reshape(-1, imputation.shape[-1])
imputation_denorm = scaler.inverse_transform(imputation_reshaped)
imputation_denorm = imputation_denorm.reshape(imputation.shape)
# Tomar las primeras posiciones imputadas de cada ventana
imputed_values = imputation_denorm[:, 0, :]
print("Shape de los datos imputados finales:", imputed_values.shape)
# Reconstruir el DataFrame con los valores imputados
data_imputed = pd.DataFrame(imputed_values, columns=df.columns, index=df_original.index[:imputed_values.shape[0]])
# ----------------------------------------
# 📌 VISUALIZAR ORIGINAL VS IMPUTADO
# ----------------------------------------
import matplotlib.pyplot as plt
fig, axes = plt.subplots(
int(np.ceil(len(df_original.columns) / 2)), 2, figsize=(16, 2 * int(np.ceil(len(df_original.columns) / 2)))
)
for ax, col in zip(axes.flat, df_original.columns):
ax.plot(df_original.index, df_original[col], label="Original", color='blue')
ax.plot(df_original.index, data_imputed[col], ':', label="Imputed", color='orange')
ax.set_title(col)
fig.legend(['Original', 'Imputed'], loc='upper center', ncol=2, fontsize=12)
plt.tight_layout(rect=[0, 0, 1, 0.96])
plt.show()
`
📊 Resultados de la imputación con SAITS¶
| Variable | MAE | MSE | RMSE | R² |
|---|---|---|---|---|
| CO(GT) | 0.281 | 0.106 | 0.326 | 0.746 |
| PT08.S1(CO) | 61.061 | 5673.883 | 75.325 | 0.850 |
| C6H6(GT) | 0.995 | 1.878 | 1.370 | 0.872 |
| PT08.S2(NMHC) | 37.641 | 2561.053 | 50.607 | 0.929 |
| NOx(GT) | 48.429 | 3705.005 | 60.869 | 0.866 |
| PT08.S3(NOx) | 70.764 | 9218.081 | 96.011 | 0.780 |
| NO2(GT) | 15.125 | 357.961 | 18.920 | 0.861 |
| PT08.S4(NO2) | 78.496 | 10095.427 | 100.476 | 0.858 |
| PT08.S5(O3) | 94.586 | 13372.547 | 115.640 | 0.864 |
| T | 2.115 | 6.943 | 2.635 | 0.840 |
| RH | 6.708 | 65.337 | 8.083 | 0.674 |
| AH | 0.125 | 0.022 | 0.147 | 0.859 |
💡 Preguntas¶
- ¿Qué variables presentan la imputación más precisa según R²? ¿Por qué creen que ocurre?
- ¿Qué características del dataset podrían dificultar la imputación de ciertas variables?
- ¿El error de imputación sería aceptable para un análisis ambiental? ¿Por qué?
🎯 Modelado de CO(GT) usando Transformer¶
Una vez imputados los valores faltantes, el objetivo es modelar la serie temporal de CO(GT) para predecir su valor futuro a partir de sus valores anteriores y/o las demás variables.
👉 Variable objetivo: CO(GT)
👉 Justificación: Es una variable ambiental clave, con tendencia y estacionalidad diarias evidentes, lo que la hace adecuada para modelado secuencial.
📌 Descripción del flujo¶
El modelo Transformer recibe secuencias pasadas y aprende a predecir el siguiente valor de CO(GT).
📌 Código base¶
import torch
import torch.nn as nn
from torch.utils.data import DataLoader, TensorDataset
# ----------------------------------------
# 📌 PREPARAR LOS DATOS
# ----------------------------------------
seq_len = 7 # Usaremos 7 días como ventana (se puede ajustar)
# Tomamos la serie imputada
series = data_imputed['CO(GT)'].to_numpy(dtype=np.float32)
# Generar secuencias y etiquetas
X = []
y = []
for i in range(len(series) - seq_len):
X.append(series[i:i + seq_len])
y.append(series[i + seq_len])
X = np.array(X) # (n_samples, seq_len)
y = np.array(y) # (n_samples,)
# Añadir dimensión de características (1 característica: CO)
X = X[..., np.newaxis] # (n_samples, seq_len, 1)
# Crear dataloader
batch_size = 16
dataset = TensorDataset(torch.from_numpy(X), torch.from_numpy(y))
loader = DataLoader(dataset, batch_size=batch_size, shuffle=True)
# ----------------------------------------
# 📌 DEFINIR EL TRANSFORMER
# ----------------------------------------
class SimpleTransformer(nn.Module):
def __init__(self, seq_len, d_model=64, nhead=4, num_layers=2):
super().__init__()
self.input_proj = nn.Linear(1, d_model)
encoder_layer = nn.TransformerEncoderLayer(d_model=d_model, nhead=nhead)
self.transformer = nn.TransformerEncoder(encoder_layer, num_layers=num_layers)
self.output = nn.Linear(d_model, 1)
def forward(self, x):
# x: (batch, seq_len, 1)
x = self.input_proj(x) # (batch, seq_len, d_model)
x = x.permute(1, 0, 2) # Transformer espera (seq_len, batch, d_model)
x = self.transformer(x)
x = x[-1] # Tomamos la salida del último paso temporal
x = self.output(x).squeeze(1) # (batch,)
return x
# Instanciar el modelo
model = SimpleTransformer(seq_len=seq_len)
# ----------------------------------------
# 📌 ENTRENAR
# ----------------------------------------
loss_fn = nn.MSELoss()
optimizer = torch.optim.Adam(model.parameters(), lr=1e-3)
n_epochs = 50
for epoch in range(n_epochs):
model.train()
epoch_loss = 0
for batch_X, batch_y in loader:
optimizer.zero_grad()
pred = model(batch_X)
loss = loss_fn(pred, batch_y)
loss.backward()
optimizer.step()
epoch_loss += loss.item()
print(f"Epoch {epoch+1}/{n_epochs}, Loss: {epoch_loss / len(loader):.4f}")
# ----------------------------------------
# 📌 EVALUAR (p. ej. en todo el conjunto)
# ----------------------------------------
model.eval()
with torch.no_grad():
y_pred = model(torch.from_numpy(X)).numpy()
import matplotlib.pyplot as plt
plt.figure(figsize=(10, 4))
plt.plot(y, label='True')
plt.plot(y_pred, label='Predicted', linestyle=':')
plt.legend()
plt.title("Predicción de CO(GT) con Transformer")
plt.show()
`
✅ Lo que debes hacer¶
- Ejecutar el código.
- Observar las predicciones generadas.
- Reflexionar: ¿Cómo se ajusta el modelo a los datos? ¿Qué podríamos mejorar (más capas, regularización, más features)?
🎯 Forecasting multivariado de CO con Transformer¶
El objetivo es modelar y predecir el CO utilizando un Transformer multivariado.
👉 El modelo aprende a partir de los datos previos y se evalúa su desempeño sobre un conjunto de test (último 20% del tiempo).
Se graficará la serie completa mostrando el ajuste y se compararán los valores reales y predichos en test.
📌 Código base¶
import torch
import torch.nn as nn
from torch.utils.data import DataLoader, TensorDataset
import numpy as np
import matplotlib.pyplot as plt
# ----------------------------------------
# 📌 PREPARAR LOS DATOS
# ----------------------------------------
seq_len = 7
data_arr = data_imputed.to_numpy(dtype=np.float32)
# Secuencias y etiquetas
X = []
y = []
for i in range(len(data_arr) - seq_len):
X.append(data_arr[i:i + seq_len])
y.append(data_arr[i + seq_len][data_imputed.columns.get_loc('CO(GT)')])
X = np.array(X)
y = np.array(y)
# Separar train / test (80% / 20%)
split_idx = int(0.8 * len(X))
X_train, X_test = X[:split_idx], X[split_idx:]
y_train, y_test = y[:split_idx], y[split_idx:]
# DataLoader
batch_size = 16
train_loader = DataLoader(TensorDataset(torch.from_numpy(X_train), torch.from_numpy(y_train)),
batch_size=batch_size, shuffle=True)
# ----------------------------------------
# 📌 DEFINIR EL TRANSFORMER
# ----------------------------------------
class ForecastTransformer(nn.Module):
def __init__(self, n_features, d_model=64, nhead=4, num_layers=2):
super().__init__()
self.input_proj = nn.Linear(n_features, d_model)
encoder_layer = nn.TransformerEncoderLayer(d_model=d_model, nhead=nhead)
self.transformer = nn.TransformerEncoder(encoder_layer, num_layers=num_layers)
self.output = nn.Linear(d_model, 1)
def forward(self, x):
x = self.input_proj(x) # (batch, seq_len, d_model)
x = x.permute(1, 0, 2) # (seq_len, batch, d_model)
x = self.transformer(x)
x = x[-1]
x = self.output(x).squeeze(1)
return x
model = ForecastTransformer(n_features=X.shape[2])
# ----------------------------------------
# 📌 ENTRENAR
# ----------------------------------------
loss_fn = nn.MSELoss()
optimizer = torch.optim.Adam(model.parameters(), lr=1e-3)
n_epochs = 50
for epoch in range(n_epochs):
model.train()
epoch_loss = 0
for batch_X, batch_y in train_loader:
optimizer.zero_grad()
pred = model(batch_X)
loss = loss_fn(pred, batch_y)
loss.backward()
optimizer.step()
epoch_loss += loss.item()
print(f"Epoch {epoch+1}/{n_epochs}, Loss: {epoch_loss / len(train_loader):.4f}")
# ----------------------------------------
# 📌 PREDICCIONES
# ----------------------------------------
model.eval()
with torch.no_grad():
y_pred_train = model(torch.from_numpy(X_train)).numpy()
y_pred_test = model(torch.from_numpy(X_test)).numpy()
# ----------------------------------------
# 📌 PLOT DE LA SERIE COMPLETA
# ----------------------------------------
plt.figure(figsize=(12, 5))
plt.plot(range(len(y)), y, label='True CO(GT)', color='blue')
plt.plot(range(seq_len, seq_len + len(y_pred_train)), y_pred_train, label='Predicted Train', color='green', alpha=0.7)
plt.plot(range(seq_len + len(y_pred_train), seq_len + len(y_pred_train) + len(y_pred_test)),
y_pred_test, label='Predicted Test', color='orange', linestyle=':')
plt.axvline(seq_len + len(y_pred_train), color='gray', linestyle='--', label='Train/Test Split')
plt.legend()
plt.title("CO(GT) Forecasting - True vs Predicted (Train + Test)")
plt.xlabel("Time step")
plt.ylabel("CO(GT)")
plt.show()
# ----------------------------------------
# 📌 PLOT COMPARATIVO TEST FINAL
# ----------------------------------------
plt.figure(figsize=(10, 4))
plt.plot(y_test, label='True CO(GT)', color='blue')
plt.plot(y_pred_test, label='Predicted CO(GT)', color='orange', linestyle=':')
plt.legend()
plt.title("CO(GT) Forecasting - Test Set Detail")
plt.xlabel("Time step")
plt.ylabel("CO(GT)")
plt.show()
✅ Lo que se espera¶
- Analizar el gráfico de la serie completa: ¿cómo se ajusta el modelo en train y en test?
- Observar el detalle en test: ¿qué tan bien predice el modelo los valores futuros?
Proponer mejoras si fuera necesario (más capas, regularización, ajuste de hiperparámetros).
Vea las recomendaciones al final de la Opción 2 para incluir posibles mejoras en el modelo.
📝 Opción 2 - Informe ejecutivo: Imputación de valores faltantes y forecasting de CO(GT)¶
📌 Contexto¶
El trabajo se realizó sobre un conjunto de datos de calidad del aire recogido en una estación en Italia (2004-2005), con variables como CO(GT), NOx(GT), sensores PT08.*, temperatura (T), humedad relativa (RH) y humedad absoluta (AH).
📝 Instrucción para el informe ejecutivo¶
En esta opción de informe ejecutivo, el estudiante no debe centrarse en el código ni en su ejecución. El objetivo es que:
✅ Analice críticamente los resultados obtenidos, basándose en:
- Las figuras proporcionadas: visualización de valores faltantes, imputación realizada por SAITS, y predicciones del modelo Transformer.
- Las métricas de evaluación de la imputación (MAE, MSE, RMSE, R² por variable).
- Las métricas del modelo de forecasting (MAE, MSE, RMSE, R² en test).
✅ Discuta los aciertos y limitaciones:
- ¿Qué variables se imputaron mejor y por qué?
- ¿Qué patrones se observan en las figuras de imputación y forecasting?
- ¿Qué dificultades tuvo el modelo para generalizar al conjunto de test?
✅ Proponga recomendaciones para mejorar:
Argumentar cómo podrían optimizarse los resultados, considerando pistas como:
- Aumentar la longitud de la ventana temporal (
seq_len). - Ajustar el número de capas, cabezas de atención y dimensiones del Transformer.
- Aplicar mayor regularización (dropout, weight decay).
- Explorar otras arquitecturas como LSTM, TCN o enfoques híbridos.
- Incorporar variables adicionales o exógenas (por ejemplo: estacionales, día de la semana).
- Aumentar la longitud de la ventana temporal (
✅ Redacte un informe claro y estructurado, que:
- Incluya las figuras proporcionadas como soporte visual.
- Presente las métricas en tablas.
- Explique los resultados en un lenguaje técnico, pero accesible.
💡 Pautas adicionales¶
👉 El informe debe responder a preguntas como:
- ¿Qué evidencian los gráficos en relación con la imputación y el forecasting?
- ¿Qué métricas destacan por su buen o mal desempeño?
- ¿Qué tan adecuados son los resultados para un análisis ambiental real?
👉 Se espera un análisis reflexivo y bien argumentado, que sirva como base para futuras mejoras del proceso.
🎯 Generación y visualización de valores faltantes¶
Se introdujo un 20% de valores faltantes en bloques para simular fallos de sensores.
📌 Figura: Matriz de valores faltantes en bloques
📌 Figura: Series temporales con valores faltantes resaltados
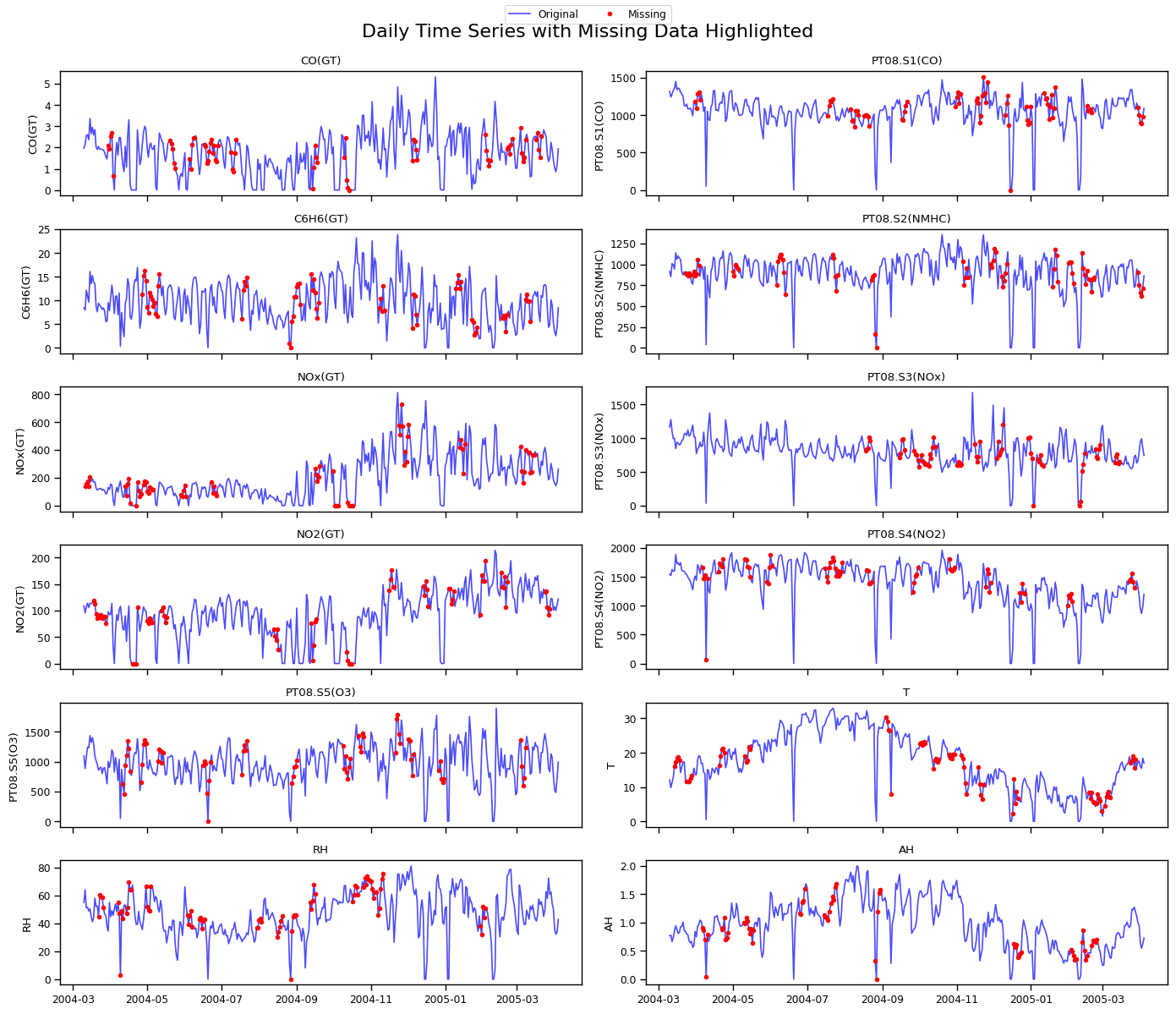
Observaciones:
- Los valores faltantes se distribuyen en tramos consecutivos en todas las variables.
- Las series temporales muestran los huecos (en rojo) que representan los bloques de datos faltantes.
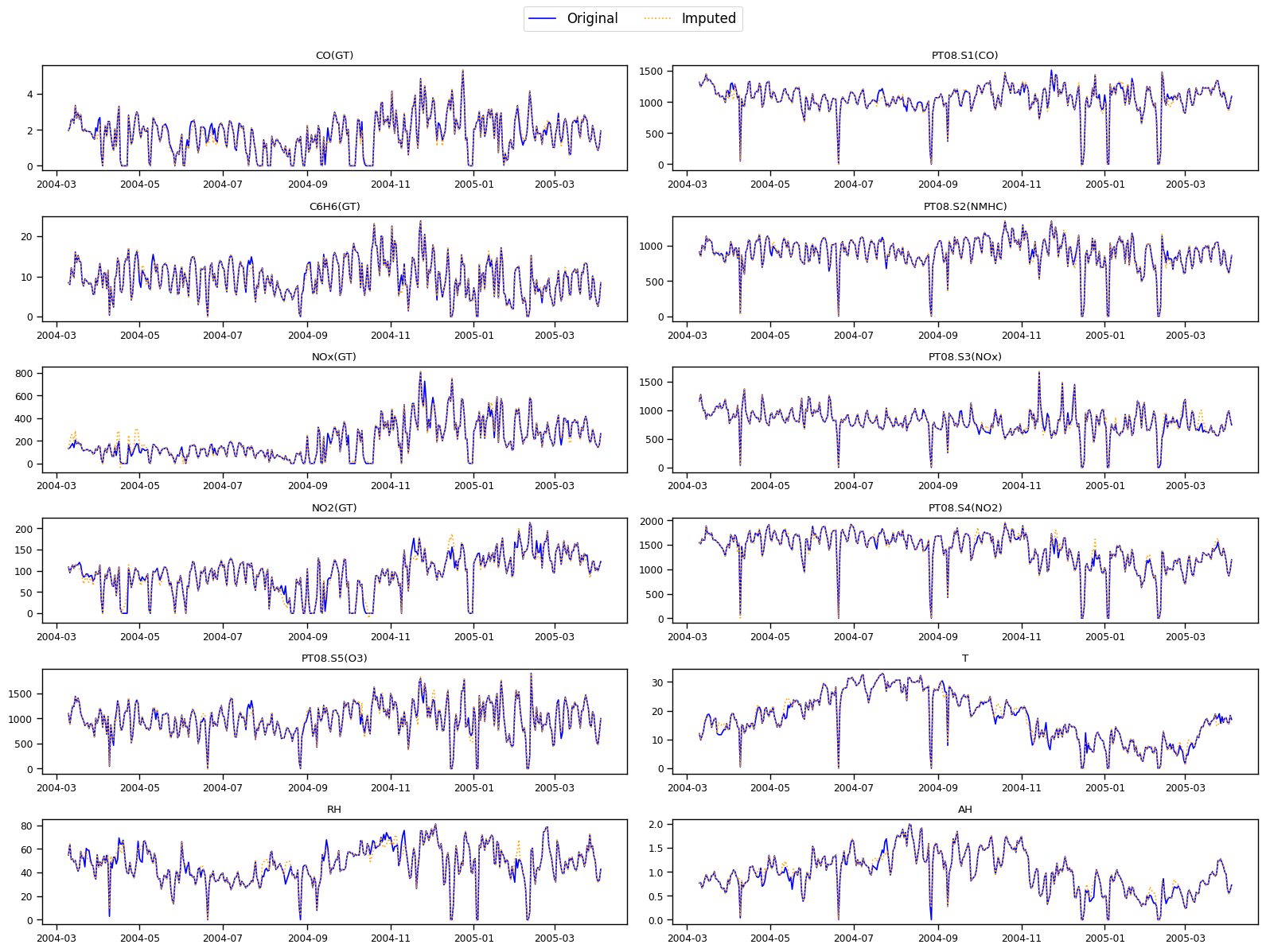
🎯 Imputación con SAITS¶
Se aplicó el modelo SAITS para completar los datos.
📌 Figura: Comparación de series originales vs imputadas
📊 Métricas de evaluación de la imputación¶
| Variable | MAE | MSE | RMSE | R² |
|---|---|---|---|---|
| CO(GT) | 0.281 | 0.106 | 0.326 | 0.746 |
| PT08.S1(CO) | 61.061 | 5673.883 | 75.325 | 0.850 |
| C6H6(GT) | 0.995 | 1.878 | 1.370 | 0.872 |
| PT08.S2(NMHC) | 37.641 | 2561.053 | 50.607 | 0.929 |
| NOx(GT) | 48.429 | 3705.005 | 60.869 | 0.866 |
| PT08.S3(NOx) | 70.764 | 9218.081 | 96.011 | 0.780 |
| NO2(GT) | 15.125 | 357.961 | 18.920 | 0.861 |
| PT08.S4(NO2) | 78.496 | 10095.427 | 100.476 | 0.858 |
| PT08.S5(O3) | 94.586 | 13372.547 | 115.640 | 0.864 |
| T | 2.115 | 6.943 | 2.635 | 0.840 |
| RH | 6.708 | 65.337 | 8.083 | 0.674 |
| AH | 0.125 | 0.022 | 0.147 | 0.859 |
Análisis:
- Las variables como PT08.S2(NMHC), PT08.S1(CO) y C6H6(GT) presentan R² altos (>0.85), indicando una buena imputación.
- RH muestra menor desempeño (R² = 0.674), probablemente debido a mayor variabilidad o menor dependencia de otras variables.
🎯 Forecasting multivariado de CO(GT) con Transformer¶
El modelo Transformer fue entrenado con las variables imputadas para predecir CO(GT).
📌 Figura: True vs Predicted (Train + Test)
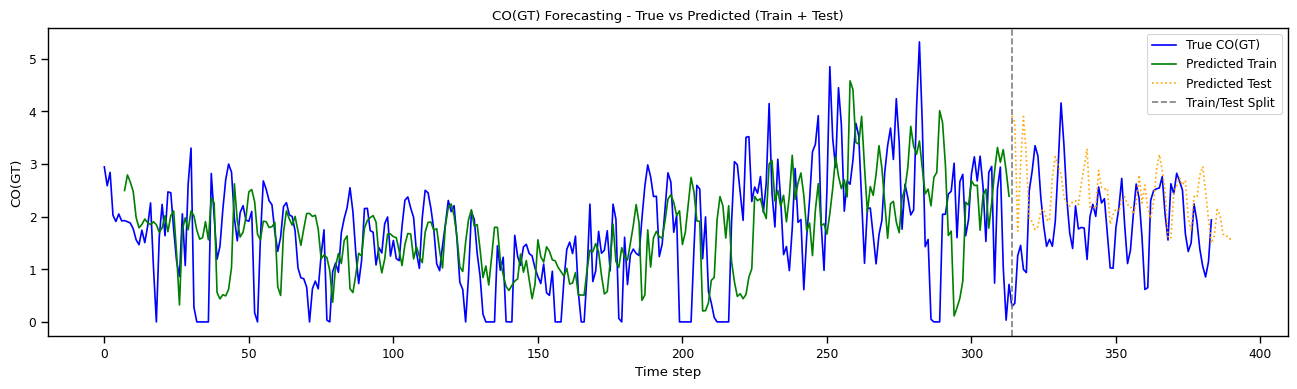
📊 Métricas de forecasting (test set)¶
| Métrica | Valor |
|---|---|
| MAE | 0.709 |
| MSE | 0.884 |
| RMSE | 0.940 |
| R² | -0.404 |
Análisis:
- El R² negativo indica que el modelo no supera un predictor constante (media de la serie), sugiriendo sobreajuste o insuficiente captura de la dinámica temporal.
- Visualmente, el modelo sigue bien la tendencia en train, pero las predicciones en test son planas o desacopladas del patrón real.
💡 Reflexiones y propuestas de mejora¶
✅ SAITS
- SAITS logra buena calidad de imputación en la mayoría de variables.
- Las variables con menor R² podrían beneficiarse de una imputación combinada (e.g. interpolación + SAITS).
✅ Transformer
- Incrementar la longitud de las secuencias (por ejemplo seq_len > 7).
- Añadir regularización (mayor dropout, weight decay).
- Probar ajustes de hiperparámetros: más capas, más cabezas de atención.
- Explorar arquitecturas alternativas como LSTM o TCN.
✅ General
- Considerar agregar variables externas (e.g. día de la semana) como input al modelo.
👉 Siguiente paso sugerido: Implementar un proceso de validación cruzada y tuning de hiperparámetros para el Transformer.